
python实现贝叶斯推断的例子
目录
- 1. 前言
- 2. 问题描述
- 3. 贝叶斯规则
- 4. Bayes engine: scalar implementation
- 5. Bayes engine: vectorization
- 6. 测试
- 7. 后记
1. 前言
本文介绍一个贝叶斯推断的python实现例,并展现了基于标量运算的实现和基于numpy的矩阵运算的实现之间的差别。
2. 问题描述
本问题例取自于Ref1-Chapter1.
问题描述:假设有一个制作灯泡的机器。你想知道机器是正常工作还是有问题。为了得到答案你可以测试每一个灯泡,但是灯泡数量很多,每一个都测试在实际生产过程中可能是无法承受的。使用贝叶斯推断,你可以基于少量样本(比如说抽检结果)来估计机器是否在正常地工作(in probabilistic way)。
构建贝叶斯推断时,首先需要两个要素:
(1) 先验分布
(2) 似然率
先验分布是我们关于机器工作状态的初始信念。首先我们确定第一个刻画机器工作状态的随机变量,记为M。这个随机变量有两个工作状态:{working, broken},以下简写成{w, br}(缩写成br是为了与下面的Bad缩写成b区分开来)。作为初始信念,我们相信机器是好的,是可以正常工作的,定义先验分布如下:
P(M=working) = 0.99
P(M=broken ) = 0.01
这表明我们对于机器正常工作的信念度很高,有99%的概率能够正常工作。
第二个随机变量是L,表示机器生产的灯泡的工作状态。灯泡可能是好,也可能是坏的,包含两个状态:{good, bad},以下简写成{g,b},注意br与b的区别。
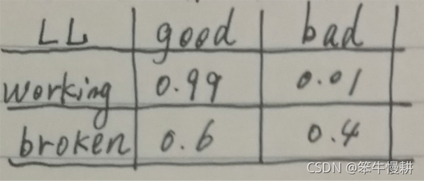
我们需要基于机器工作状态给出L的先验分布,也就是条件概率P(L|M),在贝叶斯公式中它代表似然概率(likelihood)。
定义这个似然概率分布(由于M和L各有两种状态,所以一共包含4个条件概率)如下:
P(L=Good|M=w) = 0.99
P(L=Bad |M=w) = 0.01
P(L=Good|M=br ) = 0.6
P(L=Bad |M=br ) = 0.4
以上似然概率表明,在机器正常时我们相信每生成100个灯泡只会有一个坏的,而机器不正常时也不是所有灯泡都是坏的,而是有40%会是坏的。为了实现的方便,可以写成如下的矩阵形式:
现在,我们已经完整地刻画了贝叶斯模型,可以用它来做一些神奇的估计和预测的工作了。
我们的输入是一些灯泡的抽检结果。假设我们抽检了十个灯泡其抽检结果如下:
{bad, good, good, good, good, good, good, good, good, good}
让我们来看看基于贝叶斯推断的我们对于机器工作状态的信念(后验概率)如何变化。
3. 贝叶斯规则
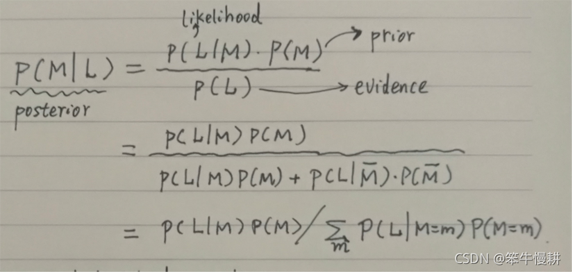
贝叶斯推断规则以贝叶斯公式的形式表示为:

具体映射到本问题中可以表达如下:
 贝
贝
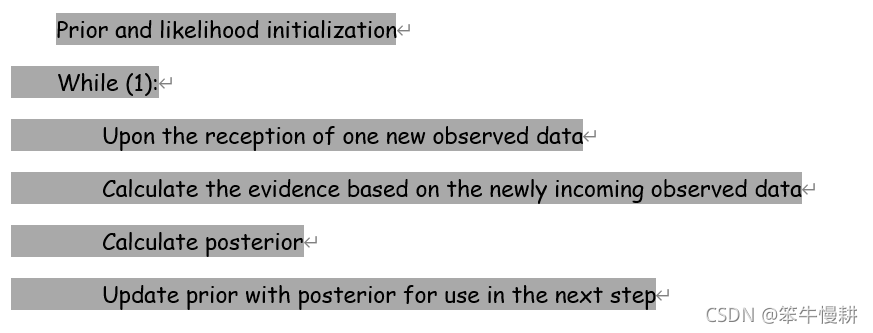
叶斯推断的优先在于可以以在线(online)的方式进行,即观测数据可以一个一个地到来,每次受到一个新的观测数据,就进行一次基于贝叶斯公式的后验概率的计算更新,而更新后的后验概率又作为下一贝叶斯推断的先验概率使用。因此在线的贝叶斯推断的基本处理流程如下所示:
4. Bayes engine: scalar implementation
首先,我们以标量运算的方式写一个函数来进行bayes推断处理。
prior以向量的形式存储先验概率分布,prior[0]表示P(M=working),prior[1]表示P(M=broken)。
likelihood以矩阵的形式方式存储似然概率分布。其中第1行表示P(L/M=working),第2行表示P(L/M=broken).
在本例中,当输入![]() 时,evidence的计算式(注意evidence是依赖于输入的观测数据的)是:
时,evidence的计算式(注意evidence是依赖于输入的观测数据的)是:

注意,当我写P(w)其实是表示P(M=w),而![]() 其实是表示
其实是表示![]() ,余者类推。根据上下文,这些应该不会导致混淆。
,余者类推。根据上下文,这些应该不会导致混淆。
第一个函数的代码如下:
def bayes_scalar(prior, likelihood, data):
"""
Bayesian inference function example.
Parameters
----------
prior : float, 1-D vector
prior information, P(X).
likelihood : float 2-D matrix
likelihood function, P(Y|X).
data : List of strings. Value: 'Good','Bad'
Observed data samples sequence
Returns
-------
posterior : float
P(X,Y), posterior sequence.
"""
posterior = np.zeros((len(data)+1,2))
posterior[0,:] = prior # Not used in computation, just for the later plotting
for k,L in enumerate(data):
if L == 'good':
L_value = 0
else:
L_value = 1
#print(L, L_value, likelihood[:,L_value])
evidence = likelihood[0,L_value] * prior[0] + likelihood[1,L_value] * prior[1]
LL0_prior_prod= likelihood[0,L_value] * prior[0]
posterior[k+1,0] = LL0_prior_prod / evidence
LL1_prior_prod= likelihood[1,L_value] * prior[1]
posterior[k+1,1] = LL1_prior_prod / evidence
prior = posterior[k+1,:] # Using the calculated posterior at this step as the prior for the next step
return posterior
5. Bayes engine: vectorization
我们注意到,evidence的计算可以表示成两个向量的点积,如下所示。
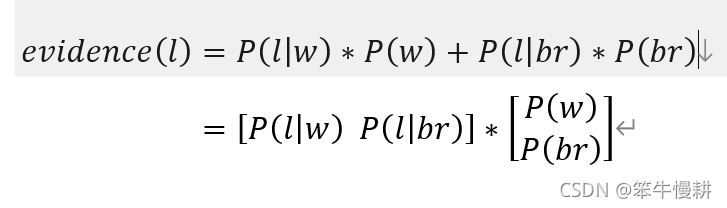
这样就非常方便用numpy来实现了。本例中每个随机变量只有两种取值,在复杂的情况下,每个随机变量有很多种取值时,有效利用向量或矩阵的运算是简洁的运算实现的必不可缺的要素。以上这两个向量的点积可以用numpy.dot()来实现。
另外,likelihood和prior的乘积是分别针对M的两种状态进行计算(注意,我们需要针对M的两种不同状态分别计算posterior),不是用向量的点积进行计算,而是一种element-wise multiplication,可以用numpy.multiply()进行计算。所以在vectorization版本中贝叶斯更新处理削减为两条语句,与上面的scalar版本相比显得非常优雅简洁(好吧,也许这个简单例子中还显不出那么明显的优势,但是随着问题的复杂度的增加,这种优势就会越来越明显了。)

由此我们得到向量化处理的函数如下:
def bayes_vector(prior, likelihood, data):
"""
Bayesian inference function example.
Parameters
----------
prior : float, 1-D vector
prior information, P(X).
likelihood : float 2-D matrix
likelihood function, P(Y|X).
data : List of strings. Value: 'Good','Bad'
Observed data samples sequence
Returns
-------
posterior : float
P(X,Y), posterior sequence.
"""
posterior = np.zeros((len(data)+1,2))
posterior[0,:] = prior # Not used in computation, just for the later plotting
for k,L in enumerate(data):
if L == 'good':
L_value = 0
else:
L_value = 1
#print(L, L_value, likelihood[:,L_value])
evidence = np.dot(likelihood[:,L_value], prior[:])
posterior[k+1,:] = np.multiply(likelihood[:,L_value],prior)/evidence
prior = posterior[k+1,:] # Using the calculated posterior at this step as the prior for the next step
return posterior
6. 测试
让我们来看看利用以上函数对我们的观测数据进行处理,后验概率将会如何变化。
import numpy as np
import matplotlib.pyplot as plt
prior = np.array([0.99,0.01])
likelihood = np.array([[0.99,0.01],[0.6,0.4]])
data = ['bad','good','good','good','good','good','good','good']
posterior1 = bayes_scalar(prior,likelihood,data)
posterior2 = bayes_vector(prior,likelihood,data)
if np.allclose(posterior1,posterior2):
print('posterior1 and posterior2 are identical!')
fig, ax = plt.subplots()
ax.plot(posterior1[:,0])
ax.plot(posterior1[:,1])
ax.grid()
# fig.suptitle('Poeterior curve vs observed data')
ax.set_title('Posterior curve vs observed data')
plt.show()
运行以上代码可以得到后验概率的变化如下图所示(注意第一个点是prior):
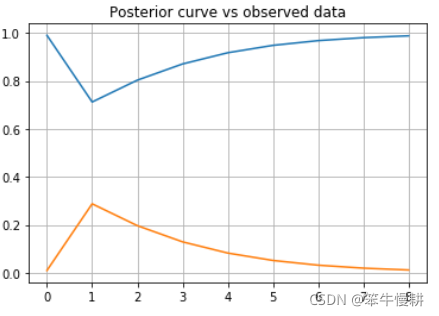
当然以上代码也顺便验证了一下两个版本的bayes函数是完全等价的。
7. 后记
大功告成。
第1个关于贝叶斯统计的学习的程序和第1篇关于贝叶斯统计的学习的博客。
其它有的没的等想到了什么再回头来写。
[Ref1] 《概率图模型:基于R语言》,David Bellot著, 魏博译
到此这篇关于python实现贝叶斯推断的例子的文章就介绍到这了,更多相关python 贝叶斯推断内容请搜索hwidc以前的文章或继续浏览下面的相关文章希望大家以后多多支持hwidc!
【文章出处:cc防御 转载请说明出处】