
OpenCV4 实现背景分离的详细步骤(背景减法模型)
目录
- 定义:
- 背景建模包括两个主要步骤:
- OpenCV中三个背景分离的重要函数
- BackgroundSubtractorMOG()
- BackgroundSubtractorMOG2
- BackgroundSubtractorGMG
- BackgroundSubtractorKNN
- C++实现:
- python实现:
- 利用图像减法函数实现(python版本):
定义:
背景分离,又称背景减法模型。
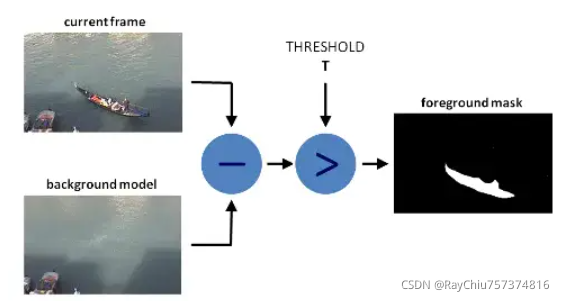
背景分离(BS)是一种通过使用静态相机来生成前景掩码(即包含属于场景中的移动对象像素的二进制图像)的常用技术。
顾名思义,BS计算前景掩码,在当前帧与背景模型之间执行减法运算,其中包含场景的静态部分,或者更一般而言,考虑到所观察场景的特征,可以将其视为背景的所有内容。
背景建模包括两个主要步骤:
1. 背景初始化;
2. 背景更新。
初步,计算背景的初始模型,而在第二步中,更新模型以适应场景中可能的变化。
OpenCV中三个背景分离的重要函数
BackgroundSubtractorMOG()
这是一个以混合高斯模型为基础的前景/背景分割算法。
它使用 K(K=3 或 5)个高斯分布混合对背景像素进行建模。使用这些颜色(在整个视频中)存在时间的长短作为混合的权重。背景的颜色一般持续的时间最长,而且更加静止。
在 x,y平面上一个像素就是一个像素,没有分布,但是背景建模是基于时间序列的,因此每一个像素点所在的位置在整个时间序列中就会有很多值,从而构成一个分布
使用函数时先用函数:CV2.createBackgroundSubtractorMOG() 创建一个背景对象。这个函数有些可选参数,比如要进行建模场景的时间长度,高斯混合成分的数量,阈值等。将他们全部设置为默认值。然后在整个视频中我们是需要使用backgroundsubtractor.apply() 就可得到前景的掩模了,移动的物体会被标记为白色,背景会被标记为黑色的,前景的掩模就是白色的了。
不过目前这个方法已经被弃用了,OpenCV中也没有了相关函数的API。
BackgroundSubtractorMOG2
这个也是以高斯混合模型为基础的背景/前景分割算法。这个算法的一个特点是它为每 一个像素选择一个合适数目的高斯分布。(上一个方法中我们使用是 K 高斯分布),这样就会对由于亮度等发生变化引起的场景变化产生更好的适应。
和前面一样我们需要创建一个背景对象。但在这里我们我们可以选择是否检测阴影。如果 detectShadows = True(默认值),它就会检测并将影子标记出来,但是这样做会降低处理速度。影子会被标记为灰色。
BackgroundSubtractorMOG2算法的两个改进点:
- -阴影检测
- -速度快了一倍
BackgroundSubtractorGMG
此算法结合了静态背景图像估计和每个像素的贝叶斯分割。它使用前面很少的图像(默认为前 120 帧)进行背景建模。使用了概率前景估计算法(使用贝叶斯估计鉴定前景)。这是一种自适应的估计,新观察到的 对象比旧的对象具有更高的权重,从而对光照变化产生适应。一些形态学操作 如开运算闭运算等被用来除去不需要的噪音,在前几帧图像中你会得到一个黑色窗口,对结果进行形态学开运算对与去除噪声很有帮助。
不过同样的,这个方法目前也是不再用了。
BackgroundSubtractorKNN
KNN作为大名鼎鼎的机器学习算法,其用在背景分离应用中也是得心应手,但是在此不对KNN作过多的解释。
C++实现:
#include "opencv2/imgcodecs.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/videoio.hpp"
#include <opencv2/highgui.hpp>
#include <opencv2/video.hpp>
#include <iostream>
#include <sstream>
using namespace cv;
using namespace std;
const int HISTORY_NUM = 7;// 14;// 历史信息帧数
const int nKNN = 3;// KNN聚类后判断为背景的阈值
const float defaultDist2Threshold = 20.0f;// 灰度聚类阈值
struct PixelHistory
{
unsigned char* gray;// 历史灰度值
unsigned char* IsBG;// 对应灰度值的前景/背景判断,1代表判断为背景,0代表判断为前景
};
int main()
{
PixelHistory* framePixelHistory = NULL;// 记录一帧图像中每个像素点的历史信息
cv::Mat frame, FGMask, FGMask_KNN;
int keyboard = 0;
int rows, cols;
rows = cols = 0;
bool InitFlag = false;
int frameCnt = 0;
int gray = 0;
VideoCapture capture("768X576.avi");
Ptr<BackgroundSubtractorKNN> pBackgroundKnn =
createBackgroundSubtractorKNN();
pBackgroundKnn->setHistory(200);
pBackgroundKnn->setDist2Threshold(600);
pBackgroundKnn->setShadowThreshold(0.5);
while ((char)keyboard != 'q' && (char)keyboard != 27)
{
// 读取当前帧
if (!capture.read(frame))
exit(EXIT_FAILURE);
cvtColor(frame, frame, COLOR_BGR2GRAY);
if (!InitFlag)
{
// 初始化一些变量
rows = frame.rows;
cols = frame.cols;
FGMask.create(rows, cols, CV_8UC1);// 输出图像初始化
// framePixelHistory分配空间
framePixelHistory = (PixelHistory*)malloc(rows * cols * sizeof(PixelHistory));
for (int i = 0; i < rows * cols; i++)
{
framePixelHistory[i].gray = (unsigned char*)malloc(HISTORY_NUM * sizeof(unsigned char));
framePixelHistory[i].IsBG = (unsigned char*)malloc(HISTORY_NUM * sizeof(unsigned char));
memset(framePixelHistory[i].gray, 0, HISTORY_NUM * sizeof(unsigned char));
memset(framePixelHistory[i].IsBG, 0, HISTORY_NUM * sizeof(unsigned char));
}
InitFlag = true;
}
if (InitFlag)
{
FGMask.setTo(Scalar(255));
for (int i = 0; i < rows; i++)
{
for (int j = 0; j < cols; j++)
{
gray = frame.at<unsigned char>(i, j);
int fit = 0;
int fit_bg = 0;
// 比较确定前景/背景
for (int n = 0; n < HISTORY_NUM; n++)
{
if (fabs(gray - framePixelHistory[i * cols + j].gray[n]) < defaultDist2Threshold)// 灰度差别是否位于设定阈值内
{
fit++;
if (framePixelHistory[i * cols + j].IsBG[n])// 历史信息对应点之前被判断为背景
{
fit_bg++;
}
}
}
if (fit_bg >= nKNN)// 当前点判断为背景
{
FGMask.at<unsigned char>(i, j) = 0;
}
// 更新历史值
int index = frameCnt % HISTORY_NUM;
framePixelHistory[i * cols + j].gray[index] = gray;
framePixelHistory[i * cols + j].IsBG[index] = fit >= nKNN ? 1 : 0;// 当前点作为背景点存入历史信息
}
}
}
pBackgroundKnn->apply(frame, FGMask_KNN);
imshow("Frame", frame);
imshow("FGMask", FGMask);
imshow("FGMask_KNN", FGMask_KNN);
keyboard = waitKey(30);
frameCnt++;
}
capture.release();
return 0;
}
python实现:
import cv2
cap=cv2.VideoCapture('./768x576.avi')
fgbg = cv2.createBackgroundSubtractorKNN()
while (1):
ret, frame = cap.read()
fgmask = fgbg.apply(frame)
cv2.imshow('frame', fgmask)
k = cv2.waitKey(100) & 0xff
if k == 27:
break
cap.release()
cv2.destroyAllWindows()
利用图像减法函数实现(python版本):
import cv2
import time
"""
背景减法
"""
cap = cv2.VideoCapture("./768x576.avi")
_, first_frame = cap.read()
first_gray = cv2.cvtColor(first_frame, cv2.COLOR_BGR2GRAY)
first_gray = cv2.GaussianBlur(first_gray, (5, 5), 0)
cv2.imshow("First frame", first_frame)
cv2.imwrite('first_frame.jpg', first_frame)
count_frame = 0
start = time.time()
while True:
count_frame += 1
_, frame = cap.read()
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
gray_frame = cv2.GaussianBlur(gray_frame, (5, 5), 0)
difference = cv2.absdiff(first_gray, gray_frame)
_, difference = cv2.threshold(difference, 25, 255, cv2.THRESH_BINARY)
cv2.imshow("Frame", frame)
cv2.imshow("difference", difference)
key = cv2.waitKey(30)
if key == 27:
break
end = time.time()
print("time %.2f s" % (end-start))
print(count_frame)
cap.release()
cv2.destroyAllWindows()
到此这篇关于OpenCV4 实现背景分离、背景减法模型的文章就介绍到这了,更多相关OpenCV4 实现背景分离内容请搜索海外IDC网以前的文章或继续浏览下面的相关文章希望大家以后多多支持海外IDC网!
【来源:自由互联、日本站群服务器】