
如何基于OpenCV&Python实现霍夫变换圆形检测
简述
基于python使用opencv实现在一张图片中检测出圆形,并且根据坐标和半径标记出圆。不涉及理论,只讲应用。
霍夫变换检测圆形的原理
其实检测圆形和检测直线的原理差别不大,只不过直线是在二维空间,因为y=kx+b,只有k和b两个自由度。而圆形的一般性方程表示为(x-a)²+(y-b)²=r²。那么就有三个自由度圆心坐标a,b,和半径r。这就意味着需要更多的计算量,而OpenCV中提供的cvHoughCircle()函数里面可以设定半径r的取值范围,相当于有一个先验设定,在每一个r来说,在二维空间内寻找a和b就可以了,能够减少计算量。
相关函数
函数说明:
Python: cv2.HoughCircles(image, method, dp, minDist[, circles[, param1[, param2[, minRadius[, maxRadius]]]]]) → circles
参数说明:
- image- 8位,单通道,灰度输入图像。
- circles- 找到的圆的输出向量。每个向量被编码为3元素的浮点向量 (x,y,半径)。
- circle_storage - 在C函数中,这是一个将包含找到的圆的输出序列的内存存储。
- method- 使用检测方法。目前,唯一实现的方法是 CV_HOUGH_GRADIENT,基本上是 21HT,在[Yuen90]中有描述 。
- dp - 累加器分辨率与图像分辨率的反比。例如,如果 dp = 1,则累加器具有与输入图像相同的分辨率。如果 dp = 2,则累加器的宽度和高度都是一半。
- minDist -检测到的圆的中心之间的最小距离。如果参数太小,除了真正的参数外,可能会错误地检测到多个邻居圈。如果太大,可能会错过一些圈子。
- param1 - 第一个方法特定的参数。在CV_HOUGH_GRADIENT的情况下, 两个传递给Canny()边缘检测器的阈值较高(较小的两个小于两倍)。
- param2 - 第二种方法参数。在CV_HOUGH_GRADIENT的情况下,它是检测阶段的圆心的累加器阈值。越小,可能会检测到越多的虚假圈子。首先返回对应于较大累加器值的圈子。
- minRadius -最小圆半径。
- maxRadius - 最大圆半径。
这是根据opencv官方文档谷歌翻译过来的,参数比较多,但用的时候只修改一些主要的,传入的图像和最大最小圆半径,以达到检测出想要的圆的效果。
还有要注意函数的返回值
找到的圆的输出向量。每个向量被编码为3元素的浮点向量 (x,y,半径)。
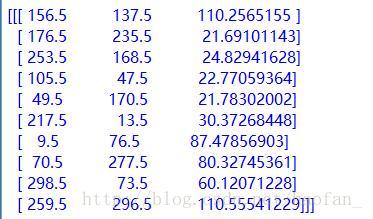
这句话不是很好理解,我们直接输出返回值就会发现是个 三层嵌套list,最内层list有三个元素,分别是圆心的行,列,半径,这表示一个圆的基本信息。多个圆基本信息组成了一个新的list,这个list包含了检测到的所有圆,即长度就是检测到圆的个数。最外层再加了个list,至于干啥的不清楚了,不影响使用就好。
下图是输出函数返回值的一个实例图
实例演示
完整代码
import cv2
#载入并显示图片
img=cv2.imread('circle.png')
cv2.imshow('img',img)
#灰度化
gray=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#输出图像大小,方便根据图像大小调节minRadius和maxRadius
print(img.shape)
#霍夫变换圆检测
circles= cv2.HoughCircles(gray,cv2.HOUGH_GRADIENT,1,100,param1=100,param2=30,minRadius=5,maxRadius=300)
#输出返回值,方便查看类型
print(circles)
#输出检测到圆的个数
print(len(circles[0]))
print('-------------我是条分割线-----------------')
#根据检测到圆的信息,画出每一个圆
for circle in circles[0]:
#圆的基本信息
print(circle[2])
#坐标行列
x=int(circle[0])
y=int(circle[1])
#半径
r=int(circle[2])
#在原图用指定颜色标记出圆的位置
img=cv2.circle(img,(x,y),r,(0,0,255),-1)
#显示新图像
cv2.imshow('res',img)
#按任意键退出
cv2.waitKey(0)
cv2.destroyAllWindows()
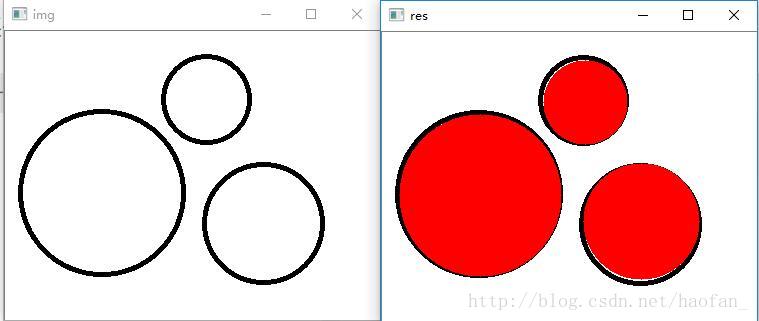
运行结果
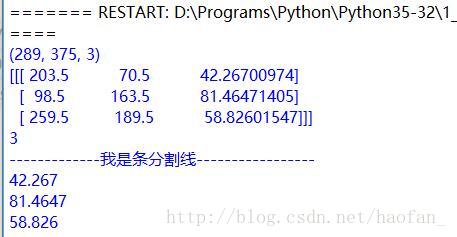
shell输出截图
总结
到此这篇关于基于OpenCV&Python实现霍夫变换圆形检测的文章就介绍到这了,更多相关OpenCV霍夫变换圆形检测内容请搜索hwidc以前的文章或继续浏览下面的相关文章希望大家以后多多支持hwidc!