
Opencv中cv2.floodFill算法的使用
目录
- 一、 泛洪算法——floodFill函数原型
- 二、简单应用
- 三、应用,结合minareaRect
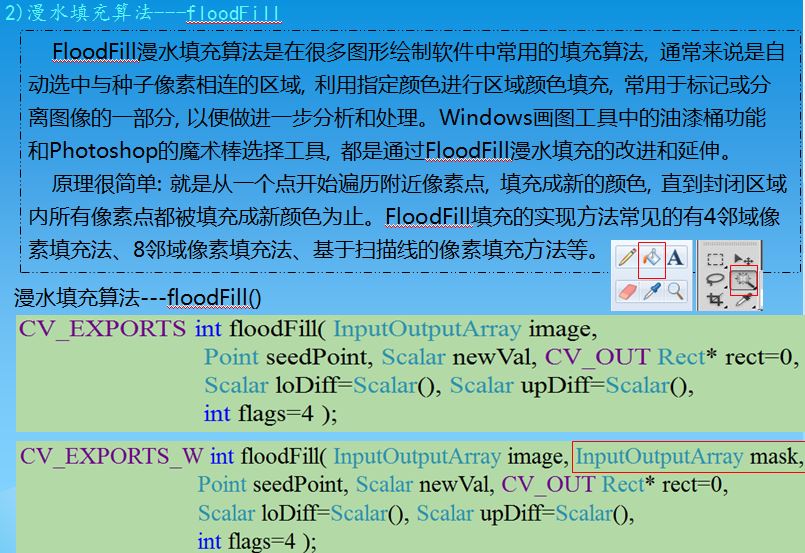
一、 泛洪算法——floodFill函数原型
cv2.floodFill(img,mask,seed,newvalue(BGR),(loDiff1,loDiff2,loDiff3),(upDiff1,upDiff2,upDiff3),flag)
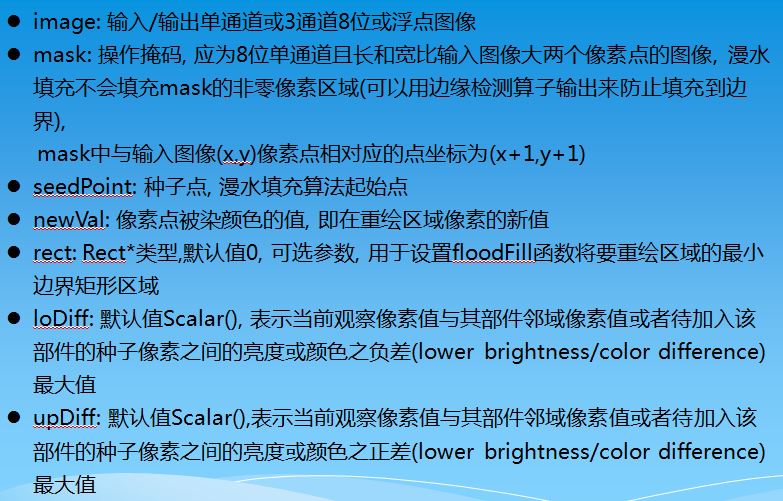
- img:为待使用泛洪算法的图像
- mask:为掩码层,使用掩码可以规定是在哪个区域使用该算法,如果是对于完整图像都要使用,则掩码层大小为原图行数+2,列数+2.是一个二维的0矩阵,边缘一圈会在使用算法是置为1。而只有对于掩码层上对应为0的位置才能泛洪,所以掩码层初始化为0矩阵。【dtype:np.uint8】
- seed:为泛洪算法的种子点,也是根据该点的像素判断决定和其相近颜色的像素点,是否被泛洪处理。
【类似于 】
】
- newvalue:是对于泛洪区域新赋的值(B,G,R)
- (loDiff1,loDiff2,loDiff3):是相对于seed种子点像素可以往下的像素值,即seed(B0,G0,R0),泛洪区域下界为(B0-loDiff1,G0-loDiff2,R0-loDiff3)
- (upDiff1,upDiff2,upDiff3):是相对于seed种子点像素可以往上的像素值,即seed(B0,G0,R0),泛洪区域上界为(B0+upDiff1,G0+upDiff2,R0+upDiff3)
- flag:为泛洪算法的处理模式。
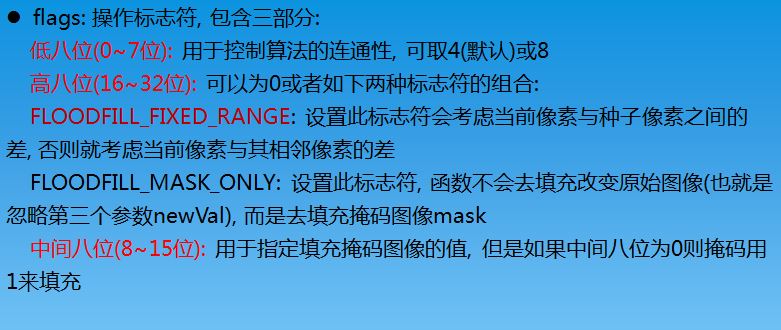
- 低八位 控制算法的连通性,是以seed点为中心,接着判断周围的几个像素点,再将泛洪区域像素点周围的几个像素点进行考虑。 一般为4,8;默认为4
- 中间八位 与掩码层赋值密切相关,一般使用(255<<8)使中间8位全位1,则值为255,也就是掩码层对应原图的泛洪区域的部分被由原来的初值0赋值成255,如果中间8位为0,则赋值为1.
- 高八位 由opencv宏参数指定
- cv2.FLOODFILL_FIXED_RANGE:改变图像,填充newvalue
- cv2.FLOODFILL_MASK_ONLY:不改变原图像,也就是newvalue参数失去作用,而是改变对应区域的掩码,设为中间八位的值
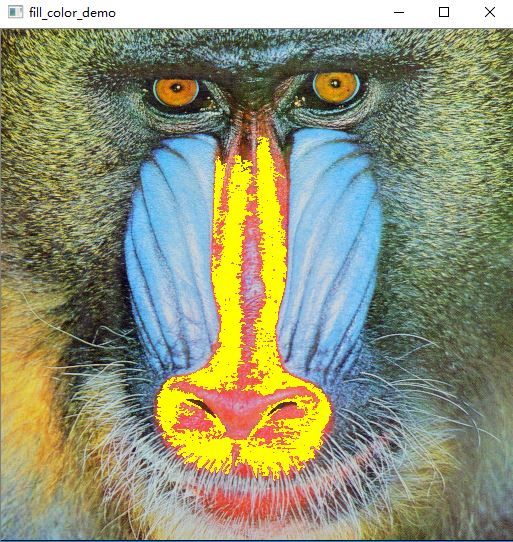
二、简单应用
#泛洪填充(彩色图像填充)
import cv2
import numpy as np
def fill_color_demo(image):
copyImg = image.copy()
h, w = image.shape[:2]
mask = np.zeros([h+2, w+2],np.uint8) #mask必须行和列都加2,且必须为uint8单通道阵列
#为什么要加2可以这么理解:当从0行0列开始泛洪填充扫描时,mask多出来的2可以保证扫描的边界上的像素都会被处理
cv.floodFill(copyImg, mask, (220, 250), (0, 255, 255), (100, 100, 100), (50, 50 ,50), cv.FLOODFILL_FIXED_RANGE)
cv.imshow("fill_color_demo", copyImg)
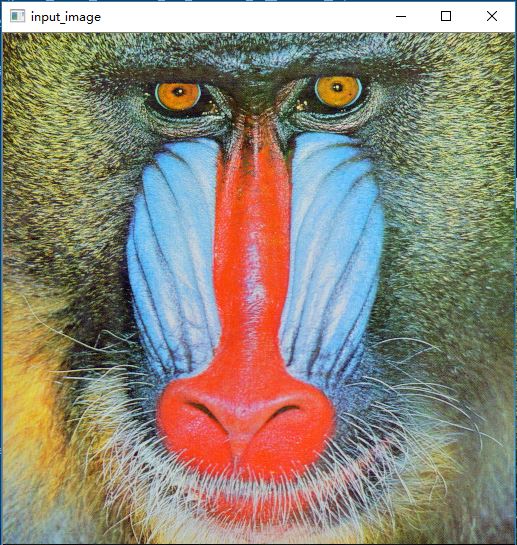
src = cv.imread('E:/imageload/baboon.jpg')
cv.namedWindow('input_image', cv.WINDOW_AUTOSIZE)
cv.imshow('input_image', src)
fill_color_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
三、应用,结合minareaRect
cv2.floodFill(initial_car,mask,(seed_x,seed_y),(255,0,0),(loDiff,loDiff,loDiff),(upDiff,upDiff,upDiff),flag)
points = []
row,column = mask.shape
for i in range(row):
for j in range(column):
if mask[i][j]==255:
points.append((j,i)) #点应该输入点坐标(列,行)
points = np.asarray(points)
new_rect = cv2.minAreaRect(points)
到此这篇关于Opencv中cv2.floodFill算法的使用的文章就介绍到这了,更多相关Opencv cv2.floodFill内容请搜索hwidc以前的文章或继续浏览下面的相关文章希望大家以后多多支持hwidc!