
OpenCV-Python实现图像梯度与Sobel滤波器
目录
- 图像梯度
- Sobel滤波器
图像梯度
图像梯度计算的是图像变化的速度。对于图像的边缘部分,其灰度值变化较大,梯度值也较大;相反,对于图像中比较平滑的部分,其灰度值变化较小,相应的梯度值也较小。一般情况下,图像的梯度计算是图像的边缘信息。
其实梯度就是导数,但是图像梯度一般通过计算像素值的差来得到梯度的近似值,也可以说是近似导数。该导数可以用微积分来表示。
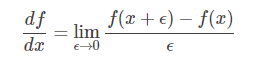
在微积分中,一维函数的一阶微分的基本定义是这样的:
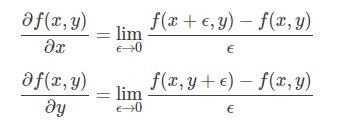
而图像是一个二维函数f(x,y),其微分当然就是偏微分。因此有:
因为图像是一个离散的二维函数,ϵ不能无限小,我们的图像是按照像素来离散的,最小的ϵ就是1像素。因此,上面的图像微分又变成了如下的形式(ϵ=1):
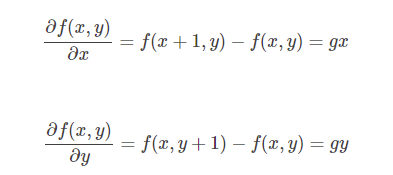
这分别是图像在(x, y)点处x方向和y方向上的梯度,从上面的表达式可以看出来,图像的梯度相当于2个相邻像素之间的差值。
那么,这个梯度(或者说灰度值的变化率)如何增强图像的清晰度呢?
我们先考虑下x方向,选取某个像素,假设其像素值是100,沿x方向的相邻像素分别是90,90,90,则根据上面的计算其x方向梯度分别是10,0,0。这里只取变化率的绝对值,表明变化的大小即可。
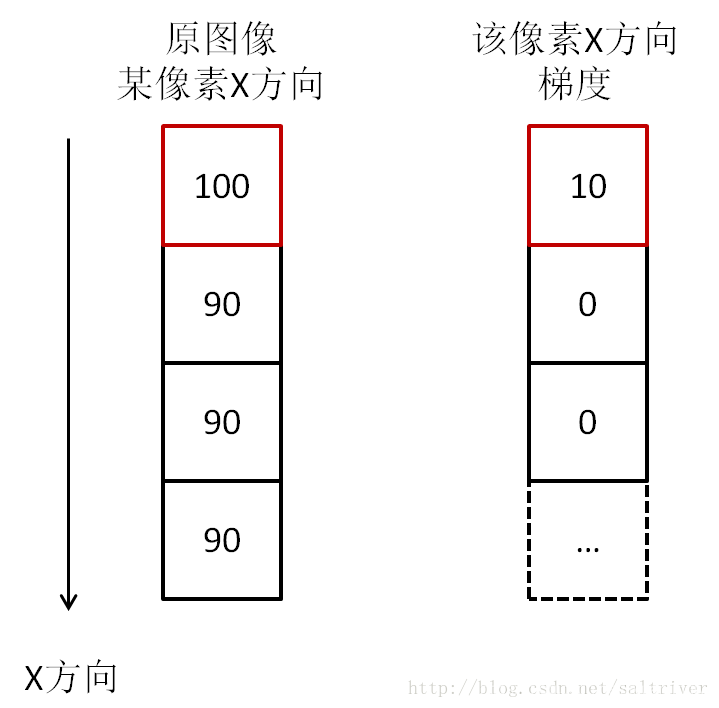
我们看到,100和90之间亮度相差10,并不是很明显,与一大群90的连续灰度值在一起,轮廓必然是模糊的。我们注意到,如果相邻像素灰度值有变化,那么梯度就有值,如果相邻像素灰度值没有变化,那么梯度就为0。如果我们把梯度值与对应的像素相加,那么灰度值没有变化的,像素值不变,而有梯度值的,灰度值变大了。
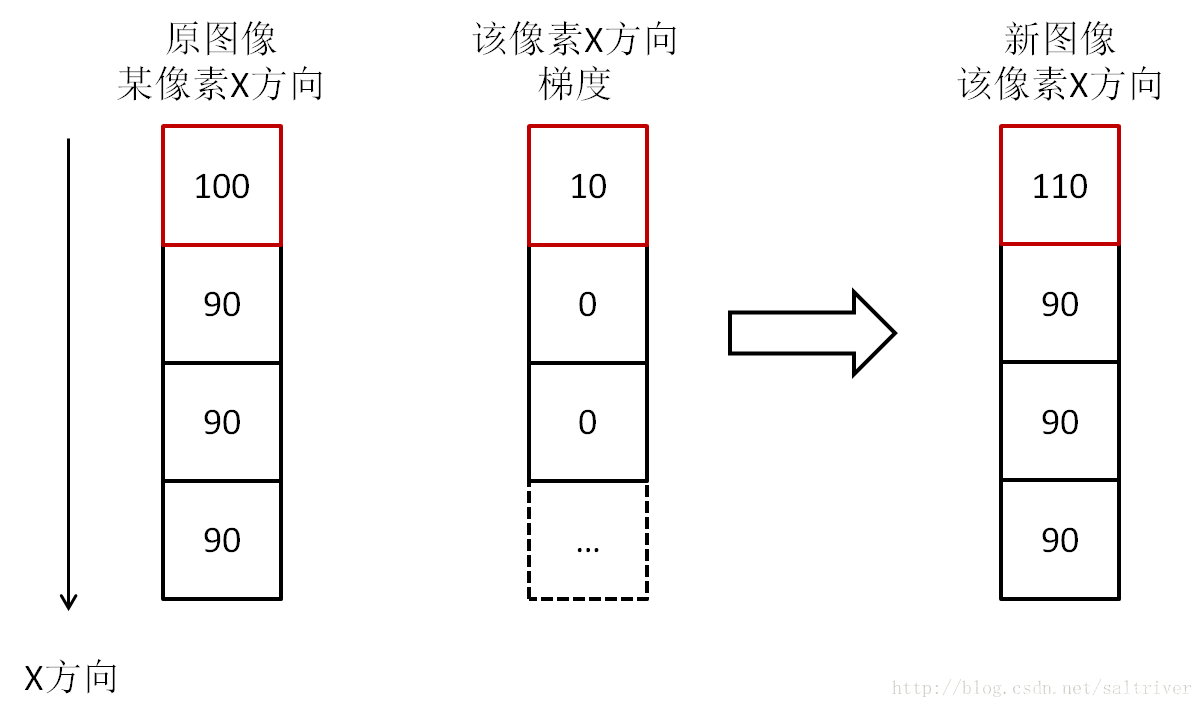
我们看到,相加后的新图像,原图像像素点100与90亮度只相差10,现在是110与90,亮度相差20了,对比度显然增强了,尤其是图像中物体的轮廓和边缘,与背景大大加强了区别,这就是用梯度来增强图像的原理。
上面只是说了x方向,y方向是一样的。那么能否将x方向和y方向的梯度结合起来呢?当然是可以的。x方向和y方向上的梯度可以用如下式子表示在一起:
这里又是平方,又是开方的,计算量比较大,于是一般用绝对值来近似平方和平方根的操作,来降低计算量:

原理了解后,我们来了解一些OpenCV提供了哪些梯度滤波器?
在OpenCV中,它给我们提供了三种不同的梯度滤波器,或者说高通滤波器:Sobel,Scharr 和Laplacian。什么叫高通呢?其实就是和图像模糊相反。图像模糊是让低频通过,阻挡高频,这样就可以去除噪点,让锐利的边缘变平滑。高通滤波器就是让高频通过,阻挡低频,可以让边缘更加明显,增强图像。
Sobel滤波器
Sobel滤波器是一种离散的微分算子,该算子结合了高斯平滑和微分求导运算。该算子利用局部差分寻找边缘,计算所得的是一个梯度的近似值。
具体的原理如下:
将Sobel滤波器与原始图像进行卷积计算,可以计算水平方向上的像素值变化情况。例如,当Sobel滤波器的大小为3*3时,水平方向偏导数的计算方式如下:
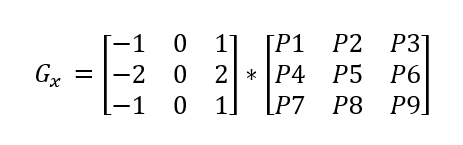
如果需要计算P5水平方向偏导数(梯度),则公式如下:
P5x=(P3-P1)+2*(P6-P4)+(P9-P7)
如果需要计算P5垂直方向偏导数(梯度),则公式如下:
P5y=(P7-P1)+2*(P8-P2)+(P9-P3)
在OpenCV中,它给我们提供cv2.Sobel()函数实现Sobel滤波器,其函数定义如下:
def Sobel(src, ddepth, dx, dy, dst=None, ksize=None, scale=None, delta=None, borderType=None):
src:原始图像
ddepth:输出图像的深度,详细取值如下表:
输入图像深度
输出图像深度
dx:代表X方向的求导阶数
dy:代表Y方向的求导阶数
ksize:Sobel核的大小,该值为-1时,则会使用Sobel滤波器进行运算
scale:计算导数值所采用的缩放因子,默认值为1,时没有缩放的
delta:加载目标图像上的值,该值可选,默认为0
borderType:边界样式,前面博文有详细介绍,这里不在赘述。
需要注意的是,如果将ddepth参数设置为-1,让处理结果与原图像保持一致,可以会得到错误的结果。实际上,这么做会导致梯度值可能出现负数。如果处理的是8位图像,意味着指定运算的结果也是8位图类型,那么所有的负数会自动截断为0,发生信息丢失。为了避免信息丢失,在计算时先使用更高的数据类型cv2.CV_64F,再通过取绝对值将其映射为cv2.CV_8U类型。所以,我们使用Sobel滤波器常常会将ddepth设置为cv2.CV_64F。
计算X方向梯度语法格式为:
cv2.Sobel(src,ddepth,1,0)
计算Y方向梯度语法格式为:
cv2.Sobel(src,ddepth,0,1)
计算XY方向梯度语法格式为:
cv2.Sobel(src,ddepth,1,1)
计算XY叠加梯度语法格式为:
dx=cv2.Sobel(src,ddepth,1,0) dy=cv2.Sobel(src,ddepth,0,1) dst=cv2.addWeighted(src1,alpha,src2,beta,gamma)
因为可能会出现负数,我们还需要使用另一个函数取绝对值,该函数为:cv2.convertScaleAbs(),其完整定义如下:
def convertScaleAbs(src, dst=None, alpha=None, beta=None):
alpha:调节系数,可选值,默认为1
beta:调节亮度值,默认为0
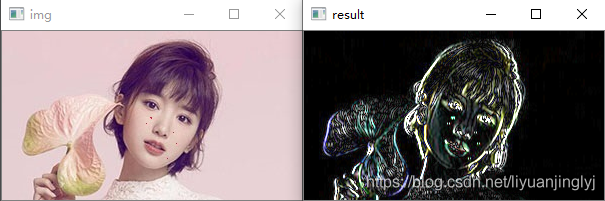
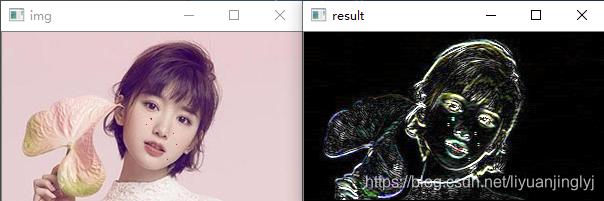
下面,我们来使用Sobel滤波器,获取图像水平方向的边缘信息,代码如下:
import cv2
img = cv2.imread("4.jpg", cv2.IMREAD_UNCHANGED)
sobel_x=cv2.Sobel(img,cv2.CV_64F,1,0)
result=cv2.convertScaleAbs(sobel_x)
cv2.imshow("img", img)
cv2.imshow("result", result)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,效果如下所示:
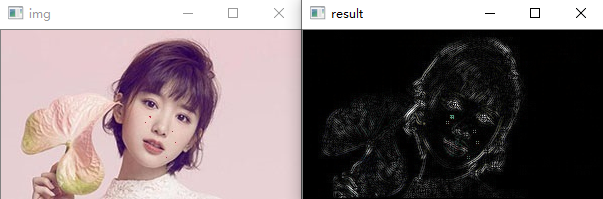
接着,我们来使用Sobel滤波器,获取图像垂直方向的边缘信息,代码如下:
import cv2
img = cv2.imread("4.jpg", cv2.IMREAD_UNCHANGED)
sobel_y=cv2.Sobel(img,cv2.CV_64F,0,1)#更改这一行就行
result=cv2.convertScaleAbs(sobel_y)
cv2.imshow("img", img)
cv2.imshow("result", result)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,效果如下:
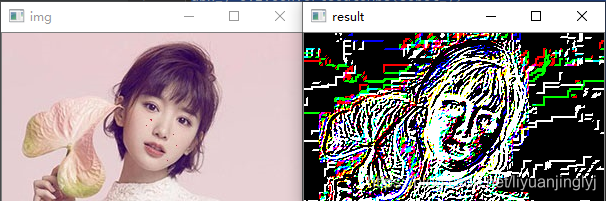
接着,我们来计算XY方向梯度,代码如下:
import cv2
img = cv2.imread("4.jpg", cv2.IMREAD_UNCHANGED)
sobel_xy=cv2.Sobel(img,cv2.CV_64F,1,1)#都设置为1
result=cv2.convertScaleAbs(sobel_xy)
cv2.imshow("img", img)
cv2.imshow("result", result)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,效果如下:
最后,我们来计算其水平垂直两个方向的叠加边缘信息,代码如下:
import cv2
img = cv2.imread("4.jpg", cv2.IMREAD_UNCHANGED)
sobel_x=cv2.Sobel(img,cv2.CV_64F,1,0)
sobel_y=cv2.Sobel(img,cv2.CV_64F,0,1)
abx_x=cv2.convertScaleAbs(sobel_x)
abx_y=cv2.convertScaleAbs(sobel_y)
result=cv2.addWeighted(sobel_x,0.5,sobel_y,0.5,0)
cv2.imshow("img", img)
cv2.imshow("result", result)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,效果如下:
到此这篇关于OpenCV-Python实现图像梯度与Sobel滤波器的文章就介绍到这了,更多相关OpenCV 图像梯度与Sobel滤波器内容请搜索hwidc以前的文章或继续浏览下面的相关文章希望大家以后多多支持hwidc!
【文章由http://www.yidunidc.com/hkgf.html 复制请保留原URL】