
python3实现Dijkstra算法最短路径的实现
问题描述
现有一个有向赋权图。如下图所示:
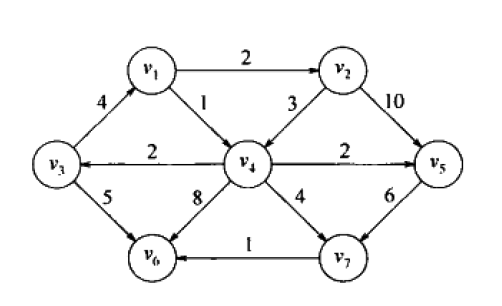
问题:根据每条边的权值,求出从起点s到其他每个顶点的最短路径和最短路径的长度。
说明:不考虑权值为负的情况,否则会出现负值圈问题。
s:起点
v:算法当前分析处理的顶点
w:与v邻接的顶点
d v d_v dv:从s到v的距离
d w d_w dw:从s到w的距离
c v , w c_{v,w} cv,w:顶点v到顶点w的边的权值
问题分析
Dijkstra算法按阶段进行,同无权最短路径算法(先对距离为0的顶点处理,再对距离为1的顶点处理,以此类推)一样,都是先找距离最小的。
在每个阶段,Dijkstra算法选择一个顶点v,它在所有unknown顶点中具有最小的 d v d_v dv,同时算法声明从s到v的最短路径是known的。阶段的其余部分为,对w的 d v d_v dv(距离)和 p v p_v pv(上一个顶点)更新工作(当然也可能不更新)。
在算法的每个阶段,都是这样处理的:
【0.5】在无权的情况下,若 d w d_w dw= ∞ \infty ∞则置 d w = d v + 1 d_w=d_v+1 dw=dv+1(无权最短路径)
【1】在有权的情况下,若 d w d_w dw= ∞ \infty ∞则置 d w = d v + c v , w d_w=d_v+c_{v,w} dw=dv+cv,w
【2】若 d w d_w dw!= ∞ \infty ∞,开始分析:从顶点v到顶点w的路径,若能使得w的路径长比w原来的路径长短一点,那么就需要对w进行更新,否则不对w更新。即满足 d v + c v , w < d w d_v+c_{v,w}<d_w dv+cv,w<dw时,就需要把 d w d_w dw的值更新为 d v + c v , w d_v+c_{v,w} dv+cv,w,同时顶点w的 p v p_v pv值得改成顶点v
实现过程
考虑Dijkstra算法过程中,有一个数据变化表。
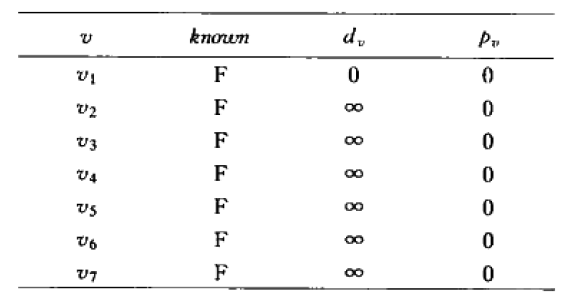
初始状态如上。开始顶点s是 v 1 v_1 v1,所有顶点都是unknown的。 v 1 v_1 v1的 d v d_v dv的值为0,因为它是起点。
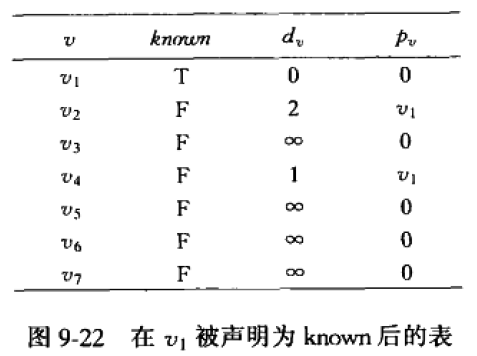
【1】选择unknown顶点中, d v d_v dv值最小的顶点,即顶点 v 1 v_1 v1。首先将 v 1 v_1 v1标记为known。对与 v 1 v_1 v1邻接的顶点 v 2 v 4 v_2 v_4 v2v4进行调整: v 2 v_2 v2的距离变为 d v + c v , w d_v+c_{v,w} dv+cv,w即 v 1 v_1 v1的 d v d_v dv值+ c 1 , 2 c_{1,2} c1,2即0+2=2, v 2 v_2 v2的 p v p_v pv值变为 v 1 v_1 v1;同理,对 v 4 v_4 v4作相应的处理。
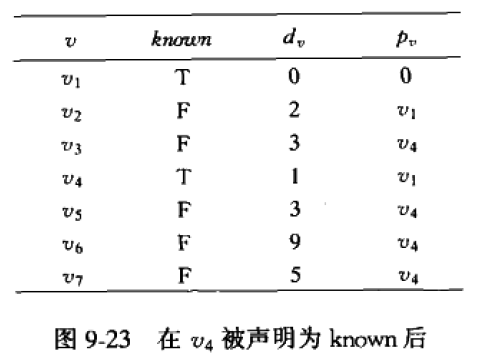
【2】选择unknown顶点中, d v d_v dv值最小的顶点,即顶点 v 4 v_4 v4(其距离为1,最小)。将 v 4 v_4 v4标记为known。对其邻接的顶点 v 3 v 5 v 6 v 7 v_3 v_5 v_6 v_7 v3v5v6v7作相应的处理。
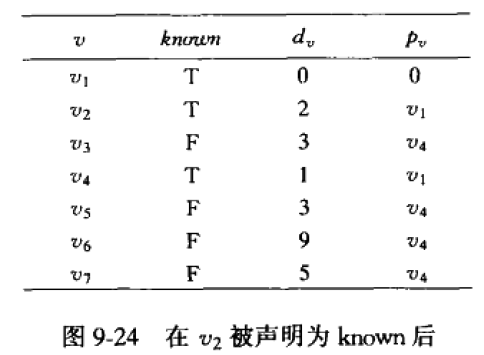
【3】选择unknown顶点中, d v d_v dv值最小的顶点,即顶点 v 2 v_2 v2(其距离为2,最小)。将 v 2 v_2 v2标记为known。对其邻接的顶点 v 4 v 5 v_4v_5 v4v5作相应的处理。但 v 4 v_4 v4是已知的,所以不需要调整;因为经过 v 2 v_2 v2到 v 5 v_5 v5的距离为2+10=12,而s到 v 5 v_5 v5路径为3是已知的(上表中, v 5 v_5 v5的 d v d_v dv为3),12>3,所以也不需要也没有必要调整。
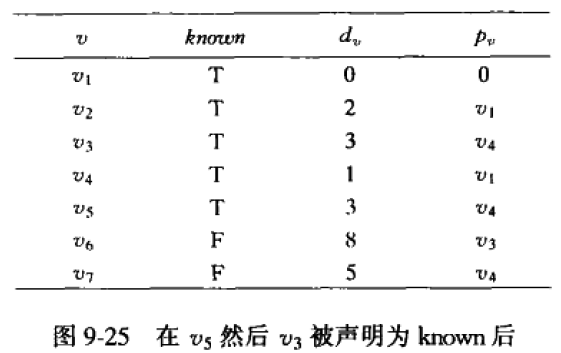
【4】选择unknown顶点中, d v d_v dv值最小的顶点,即顶点 v 5 v_5 v5(距离为3,最小,其实还有 v 3 v_3 v3也是距离为3,但博主发现这里,先 v 5 v_5 v5再 v 3 v_3 v3和先 v 3 v_3 v3再 v 5 v_5 v5的运行结果都是一样的)。将 v 5 v_5 v5标记为known。对其邻接的顶点 v 7 v_7 v7作相应的处理。但原路径长更小,所以不用调整。
【5】再对 v 3 v_3 v3处理。对 v 6 v_6 v6的距离下调到3+5=8
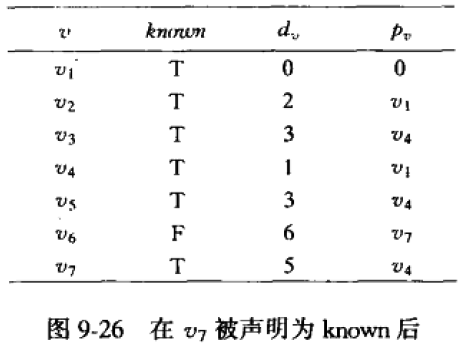
【6】再对 v 7 v_7 v7处理。对 v 6 v_6 v6的距离下调到5+1=6
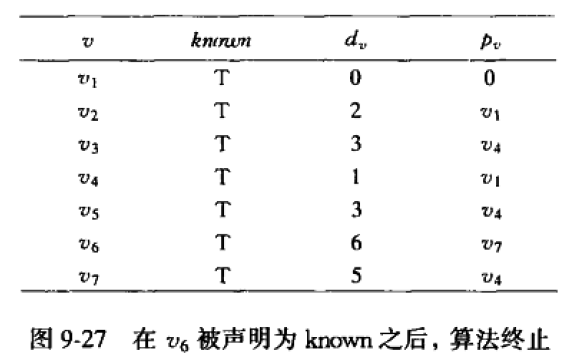
【7】最后,再对 v 6 v_6 v6处理。不需调整。
上述实现过程对应的算法,可能需要用到优先队列,每次出队 d v d_v dv值最小的顶点,因为如果只是遍历来找到 d v d_v dv值最小的顶点,可能会花费很多时间。
如何使用数据变化表
数据变化表的最终情况如下:
现在我们能找到起点 v 1 v_1 v1到任意的 v i v_i vi(除了起点)的最短路径,及其最短路径长。
比如,找到 v 1 v_1 v1到 v 3 v_3 v3的最短路径。
【1】 v 3 v_3 v3的 d v d_v dv值为3,所以最短路径长为3
【2】 v 3 v_3 v3的 p v p_v pv值为 v 4 v_4 v4,所以 v 3 v_3 v3的上一个顶点为 v 4 v_4 v4
【3】到代表 v 4 v_4 v4的第四行,发现 v 4 v_4 v4的 p v p_v pv值为 v 1 v_1 v1,所以 v 4 v_4 v4的上一个顶点为 v 1 v_1 v1
【4】 v 1 v_1 v1是起点,结束。 v 3 v_3 v3上一个是 v 4 v_4 v4, v 4 v_4 v4上一个是 v 1 v_1 v1,反过来就得到了最短路径 v 1 = > v 4 = > v 3 v_1=>v_4=>v_3 v1=>v4=>v3
上述分析,其实就是求最短路径的算法的思想:在对每个顶点对象进行处理后变成数据变化表的最终情况后,可以通过对任意顶点 v i v_i vi的 p v p_v pv值,回溯得到反转的最短路径。
代码实现
纸上得来终觉浅,绝知此事要躬行!使用python3来实现功能。
本文提到,将使用优先队列来实现寻找未知顶点中,具有最小dist的顶点。使用python已有实现好的优先队列。但实验中报错如下:

意思,Vertex实例并不支持小于比较运算符。所以需要实现Vertex类的__lt__方法。下面科普一下:
方法名
比较运算符
含义
__eq____lt____le____gt____ge__但很遗憾,python库自带的优先队列from queue import PriorityQueue,并不满足本文的需求。当PriorityQueue的元素为对象时,需要该对象的class实现__lt__函数,在往优先队列里添加元素时,内部是用的堆排序,堆排序的特点为每个堆(以及每个子堆)的第一个元素总是那个最小的元素。关键在于,在建立了这个堆后,堆就已经记录下来了创建堆时各个元素的大小关系了,在创建优先队列后,再改变某个对象的值,这个堆的结构是肯定不会变的,所以这种堆排序造成了排序是一次性的,如果之后某个对象的属性发生变化,堆的结构也不会随之而改变。
或者说,我们想要的优先队列肯定不是系统提供的优先队列,因为我们要支持可变对象的成员修改导致堆的改变,解决方案有三种,1.内部使用的堆排序的堆,最起码要支持,删除任意节点和增加节点操作(因为这两步就可以达到修改的效果了)2.这个内部堆,在执行出队操作时,考察哪个节点有修改操作,再把堆改变到正确的形态,再出队3.维护一个list,进行排降序,然后每改变一个可变对象的值,就对这个对象进行冒泡或者二分查找找到位置(因为别的都是已经排好序的了,只有它不在正确的位置),最后再list.pop(),但第三个方案是我后来想到的,所以下面代码并不是这样实现的,读者可以进行尝试,肯定比每次遍历全部快。
应该说,可能用不上队列了。我们可能只需要一个list或者set来存储v,在出队前随便vi改变其dist,在出队时再遍历找到最小的dist的vi,再删除掉这个vi即可。因为vi的dist一直在变,需求特殊,但是没必要专门造个轮子(感觉这个轮子也不好造),虽然时间复杂度可能高了点,但代码简单了啊。
优先队列中的堆排序
失效代码如下:三个节点对象的dist都是无穷大,在三个对象都进入队列,再把v3的dist改成0,想要的效果是出队出v3,但出队出的是v1。原因如上:
from queue import PriorityQueue
class Vertex:
#顶点类
def __init__(self,vid,dist):
self.vid = vid
self.dist = dist
def __lt__(self,other):
return self.dist < other.dist
v1=Vertex(1,float('inf'))
v2=Vertex(2,float('inf'))
v3=Vertex(3,float('inf'))
vlist = [v1,v2,v3]
q = PriorityQueue()
for i in range(0,len(vlist)):
q.put(vlist[i])
v3.dist = 0
print('vid:',q.get().vid)#结果为vid: 1
而如果将在入队前,就把dist改变了,就能正确的出队。
v3.dist = 0
for i in range(0,len(vlist)):
q.put(vlist[i])
#结果为vid: 3
使用set代替优先队列
class Vertex:
#顶点类
def __init__(self,vid,outList):
self.vid = vid#出边
self.outList = outList#出边指向的顶点id的列表,也可以理解为邻接表
self.know = False#默认为假
self.dist = float('inf')#s到该点的距离,默认为无穷大
self.prev = 0#上一个顶点的id,默认为0
def __eq__(self, other):
if isinstance(other, self.__class__):
return self.vid == other.vid
else:
return False
def __hash__(self):
return hash(self.vid)
#创建顶点对象
v1=Vertex(1,[2,4])
v2=Vertex(2,[4,5])
v3=Vertex(3,[1,6])
v4=Vertex(4,[3,5,6,7])
v5=Vertex(5,[7])
v6=Vertex(6,[])
v7=Vertex(7,[6])
#存储边的权值
edges = dict()
def add_edge(front,back,value):
edges[(front,back)]=value
add_edge(1,2,2)
add_edge(1,4,1)
add_edge(3,1,4)
add_edge(4,3,2)
add_edge(2,4,3)
add_edge(2,5,10)
add_edge(4,5,2)
add_edge(3,6,5)
add_edge(4,6,8)
add_edge(4,7,4)
add_edge(7,6,1)
add_edge(5,7,6)
#创建一个长度为8的数组,来存储顶点,0索引元素不存
vlist = [False,v1,v2,v3,v4,v5,v6,v7]
#使用set代替优先队列,选择set主要是因为set有方便的remove方法
vset = set([v1,v2,v3,v4,v5,v6,v7])
def get_unknown_min():#此函数则代替优先队列的出队操作
the_min = 0
the_index = 0
j = 0
for i in range(1,len(vlist)):
if(vlist[i].know is True):
continue
else:
if(j==0):
the_min = vlist[i].dist
the_index = i
else:
if(vlist[i].dist < the_min):
the_min = vlist[i].dist
the_index = i
j += 1
#此时已经找到了未知的最小的元素是谁
vset.remove(vlist[the_index])#相当于执行出队操作
return vlist[the_index]
def main():
#将v1设为顶点
v1.dist = 0
while(len(vset)!=0):
v = get_unknown_min()
print(v.vid,v.dist,v.outList)
v.know = True
for w in v.outList:#w为索引
if(vlist[w].know is True):
continue
if(vlist[w].dist == float('inf')):
vlist[w].dist = v.dist + edges[(v.vid,w)]
vlist[w].prev = v.vid
else:
if((v.dist + edges[(v.vid,w)])<vlist[w].dist):
vlist[w].dist = v.dist + edges[(v.vid,w)]
vlist[w].prev = v.vid
else:#原路径长更小,没有必要更新
pass
main()
print('v1.prev:',v1.prev,'v1.dist',v1.dist)
print('v2.prev:',v2.prev,'v2.dist',v2.dist)
print('v3.prev:',v3.prev,'v3.dist',v3.dist)
print('v4.prev:',v4.prev,'v4.dist',v4.dist)
print('v5.prev:',v5.prev,'v5.dist',v5.dist)
print('v6.prev:',v6.prev,'v6.dist',v6.dist)
print('v7.prev:',v7.prev,'v7.dist',v7.dist)
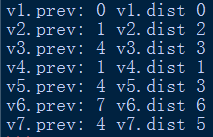
运行结果与数据变化表的最终情况一致。
得到最短路径
把以下代码和以上代码合起来就可以运行成功,使用递归的思想来做:
def real_get_traj(start,index):
traj_list = []
def get_traj(index):#参数是顶点在vlist中的索引
if(index == start):#终点
traj_list.append(index)
print(traj_list[::-1])#反转list
return
if(vlist[index].dist == float('inf')):
print('从起点到该顶点根本没有路径')
return
traj_list.append(index)
get_traj(vlist[index].prev)
get_traj(index)
print('该最短路径的长度为',vlist[index].dist)
real_get_traj(1,3)
real_get_traj(1,6)
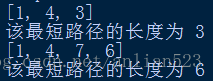
如图所示,从v1到v3的最短路径为:[1, 4, 3]
从v1到v6的最短路径为:[1, 4, 7, 6]
负权边
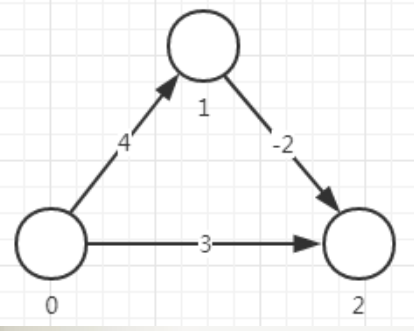
Dijkstra算法要求边上的权值不能为负数,不然就会出错。如上,本来最短路径是012,但由于算法是贪心的,所以只会直接选择到2
算法改进(若为无圈图)
注意,只有有向无圈图才有拓扑排序。
如果知道图是无圈图,那么我们可以通过改变声明顶点为known的顺序(原本这个顺序是,每次从unknown里面找出个最小dist的顶点),或者叫做顶点选取法则,来改进Dijkstra算法。新法则以拓扑排序选择顶点。由于选择和更新(每次选择和更新完成后,就会变成数据变化表中的某一种情况)可以在拓扑排序执行的时候进行,因此算法能一趟完成。
因为当一个顶点v被选取以后,按照拓扑排序的法则它肯定没有任何unknown顶点到v(指明方向)的入边,因为v的距离 d v d_v dv不可能再下降了(因为根本没有别的路到v了),所以这种选择方法是可行的。
使用这种方法不需要优先队列。
到此这篇关于python3实现Dijkstra算法最短路径的实现的文章就介绍到这了,更多相关python3 最短路径内容请搜索hwidc以前的文章或继续浏览下面的相关文章希望大家以后多多支持hwidc!